- Home
- Product Categories
- Distance
- SparkFun Qwiic ToF Imager - VL53L5CX

{kind=link}
SparkFun Qwiic ToF Imager - VL53L5CX
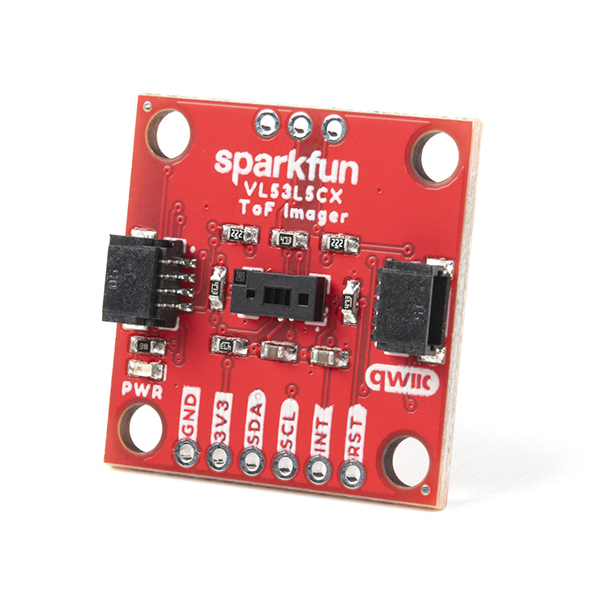
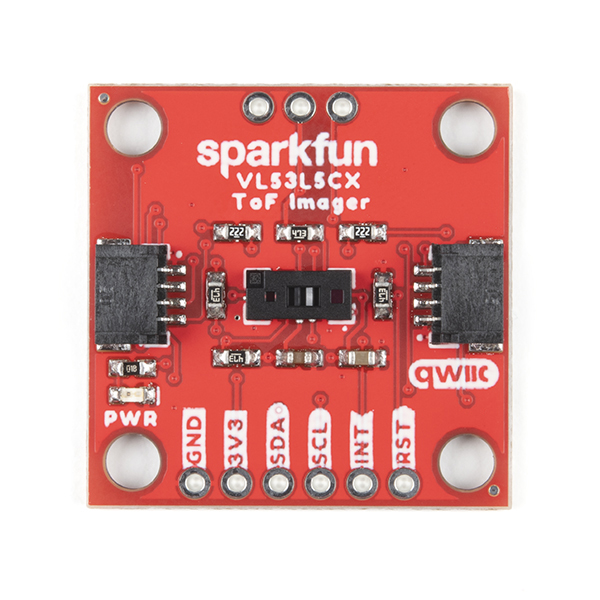
The SparkFun Qwiic ToF Imager is a state of the art, 64 pixel Time-of-Flight (ToF) 4 meter ranging sensor built around the VL53L5CX from ST. This chip integrates a SPAD array, physical infrared filters, and diffractive optical elements (DOE) to achieve the best ranging performance in various ambient lighting conditions with a range of cover glass materials. Utilizing our handy Qwiic system, no soldering is required to connect it to the rest of your system. However, we still have broken out 0.1"-spaced pins in case you prefer to use a breadboard.
Multizone distance measurements up to 4000mm are possible across all 64 zones with a wide 63° diagonal field-of-view which can be read up to 15Hz. Thanks to ST Histogram patented algorithms, the VL53L5CX is able to detect different objects within the FoV. The Histogram also provides immunity to cover glass crosstalk beyond 60cm.
Ideal for 3D room mapping, obstacle detection for robotics, gesture recognition, IoT, laser-assisted autofocus, and AR/VR enhancement, the Qwiic connector on this sensor makes integration easy.
Note: The VL53L5CX is unique in that it requires its firmware to be loaded at power-on over the I2C bus. Because this firmware is ~90k bytes, we recommend a microcontroller with enough flash to store VL53L5CX's firmware as well as your program code. Sorry, Uno's are out. But didn't you want an excuse to try out something new? We recommend choosing either an Artemis Thing Plus or an ESP32 Thing Plus board as your development board.
The SparkFun Qwiic Connect System is an ecosystem of I2C sensors, actuators, shields and cables that make prototyping faster and less prone to error. All Qwiic-enabled boards use a common 1mm pitch, 4-pin JST connector. This reduces the amount of required PCB space, and polarized connections mean you can’t hook it up wrong.
- Multizone ranging output with either 4x4 or 8x8 separate zones
- Autonomous Low-power mode with interrupt programmable threshold to wake up the host
- Up to 400 cm ranging
- 60 Hz frame rate capability
- Emitter: 940 nm invisible light vertical cavity surface emitting laser (VCSEL) and integrated analog driver
- 63 ° diagonal square FoV using diffractive optical elements (DOE) on both transmitter and receiver
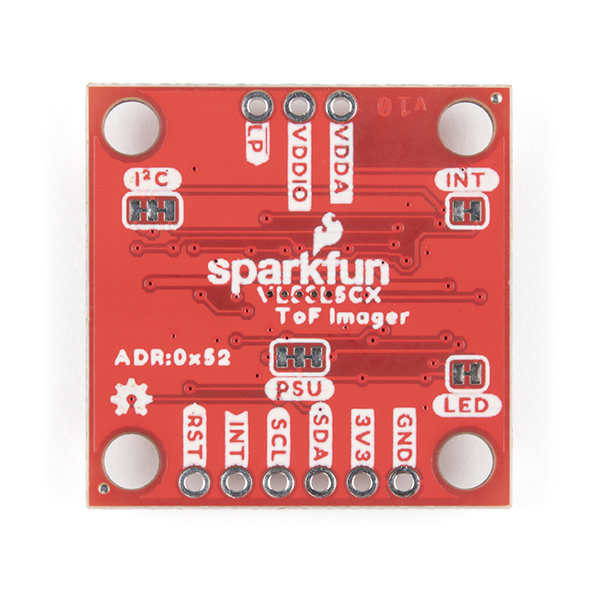
- Operating Voltage: 3.3V
- I2C Address: 0x52
- 2x Qwiic Connectors
{kind=link}
SparkFun Qwiic ToF Imager - VL53L5CX Product Help and Resources
Qwiic ToF Imager - VL53L5CX Hookup Guide
January 27, 2022
Hookup Guide for the Qwiic ToF Imager - VL53L5CX
Core Skill: Programming
If a board needs code or communicates somehow, you're going to need to know how to program or interface with it. The programming skill is all about communication and code.
Skill Level: Competent - The toolchain for programming is a bit more complex and will examples may not be explicitly provided for you. You will be required to have a fundamental knowledge of programming and be required to provide your own code. You may need to modify existing libraries or code to work with your specific hardware. Sensor and hardware interfaces will be SPI or I2C.
See all skill levels
Core Skill: Electrical Prototyping
If it requires power, you need to know how much, what all the pins do, and how to hook it up. You may need to reference datasheets, schematics, and know the ins and outs of electronics.
Skill Level: Rookie - You may be required to know a bit more about the component, such as orientation, or how to hook it up, in addition to power requirements. You will need to understand polarized components.
See all skill levels
Comments
Looking for answers to technical questions?
We welcome your comments and suggestions below. However, if you are looking for solutions to technical questions please see our Technical Assistance page.
Customer Reviews
4.5 out of 5
Based on 2 ratings:
This works great
We have this hooked up to a Particle.io Photon to control a set of robotic eyes. We use distance data from this sensor to determine where the eyes should focus. https://github.com/jschrempp/TOF
The sensor is very responsive and the distances seem very accurate. The sample code works.
I don't give it 5 stars because the documentation is hard to understand. For example, the device returns a status for each of the 8x8 zones. Each status code is listed in a table, but it's hard to know what this means for status 6, "wrap around not performed". Maybe I don't really need to know, but some more information would make this a 5. I have a number of questions that I'm having to do experiments to figure out - I'd prefer to read the answers somewhere.
If you use a pin header I recommend a right angle one so that the wires stay way away from the field of view.
If you need to know distances to things in your field of view, this is the sensor to use. We've bought 3 so far.
I have released a MicroPython and CircuitPython module for this sensor: https://github.com/mp-extras/vl53l5cx